
From Stiff Machines to Natural Motion
Passive Dynamic Walkers and Rethinking How Robots Move

The early days of robotics mirrored the science fiction. They were defined by a philosophy that imposed a mathematically precise, pre-calculated trajectory upon their movements. Their stiff joints and whining servomotors were fighting a constant, jerky battle against the pull of gravity. The robot moved only because powerful motors forced it to, consuming vast amounts of energy to maintain a semblance of balance.
Passive Dynamic Walkers
It turns out that the pursuit of beautiful, efficient motion might not begin with power, but with surrender. This shift in perspective has emerged from an unlikely source: a class of machines known as passive dynamic walkers. These contraptions are stark in their simplicity.
They possess no batteries, no computers, and no actuators. When placed on a gentle slope and given a slight nudge, they do something extraordinary: they stroll.
They settle into a rhythmic, comfortable gait, adjusting to slight imperfections in the ramp, looking startlingly human in stride. This is engineering stripped to its bones, demonstrating a “zen-like” cooperation with physics rather than a brute-force conquest of it.
The secret of the passive walker lies in how it utilizes energy. The traditional robot fights gravity every step of the way. The passive walker, by contrast, harnesses it. Its motion can be modeled simply as a rimless wheel rolling downhill. As the “foot” (or spoke) hits the ground, energy is lost to impact. However, as the body tips forward over that stance leg, gravity supplies energy needed for the next swing.
By adding a hinge for a hip, knees and a weighted torso, engineers can craft a bipedal mechanism where the mechanics do the “thinking.” The grace of the movement is not programmed into a microprocessor; it is inherent in the length of the thigh, the weight of the calf, and the free-swinging nature of the joints. The machine doesn’t need to be told how to walk; it is built to walk.
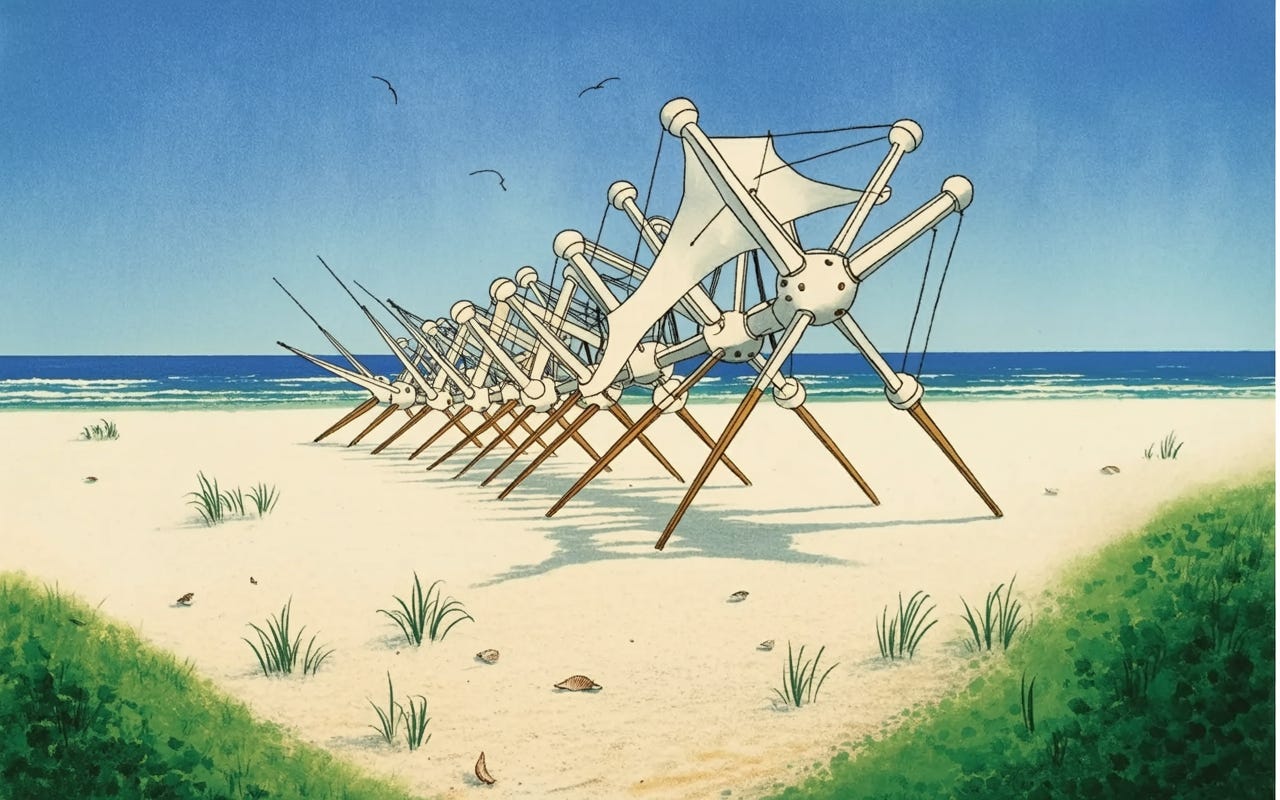
These walking contraptions remind me of the work of artist Theo Jansen. His "Strandbeests" are massive, skeletal creatures crafted from PVC piping. They roam the windswept beaches of the Netherlands, serving as a kinetic bridge between art and engineering.
Unlike passive dynamic walkers that rely on the potential energy of a slope, Jansen’s beasts harness the wind, capturing it in “sails” that drive a complex system of crankshafts and legs. The elaborate linkages convert wind into a smooth, stepping gait that prevents the heavy structures from sinking into the soft sand.
Janse’s Strandbeests possess no silicon brains or electronic sensors; instead, they utilize primitive logic gates made of tubing to sense water or loose sand, mechanically reversing their course to survive. In doing so, Jansen demonstrates that life-like autonomy does not require a computer; it requires a geometry that listens to the world around it.
These elegant approaches to locomotion suggest ways for us to understand how humans move. Maybe what we think of as “control” exercised by the brain over the body is less about micromanaging every muscle fiber and more about offering gentle nudges to a system that naturally wants to move. Biological creatures are hybrid systems. We are partially active, using muscle power, but hugely passive.
Human walking is often described as a process of “controlled falling.” We throw our center of mass forward, letting gravity do the work, and then swing a leg forward to catch ourselves, using the elastic energy stored in tendons to bounce into the next step. We are, in effect, passive dynamic walkers on flat ground, using our muscles just enough to create a virtual downhill slope.
These lessons of movement extend beyond mechanics and into a philosophy of design. They teach that complexity in behavior does not always require complexity in control. Often, the most robust and elegant solutions come from yielding to the inevitable forces of the environment. By stepping back and allowing physics to shoulder the burden, engineers can create machines that are not only more energy-efficient but also possess a naturalism that eludes highly computationally driven systems.
The future of robotic motion may not emerge from more powerful AI or stronger actuators but from understanding graceful acquiescence: the insight that true mastery comes from moving with the world’s invisible forces, not against them.